
바다에 대한 열정을 고객님들과 함께 나누는 기업
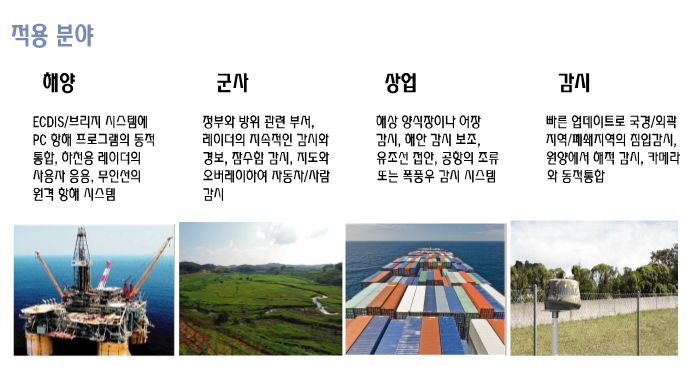
| 해상용 | ECDIS/브릿지 시스템, 강 레이더 커스텀 어플리케이션, 로봇식 무인선 등의 차팅/내비게이션 프로그램에 통합 |
|---|---|
| 군사용 | 강/해안/국경 경계, 레이더 경보가 포함된 정밀 감시, 잠수함 포드, 기 개발된 지도 프로그램에 오버래이를 통한 차량/사람 통행 모니터링 |
| 상업용 | 양식장, 가두리 등 감시 시스템, 부두 경계 보조, 석유 굴착선 도킹, 공항의 조류 감시 시스템 |
| 경계용 | 국경/경계 지역 및 고속 업데이트를 통한 근접거리에서의 침입 방지, 해양에서 소형 해적선 탐지, 카메라 통합 |

| 스캐너항목 | HALO 6 | HALO 4 | HALO 3 | 4G | 3G |
|---|---|---|---|---|---|
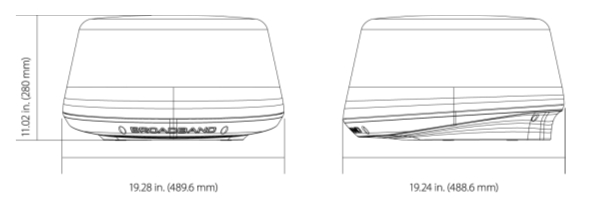
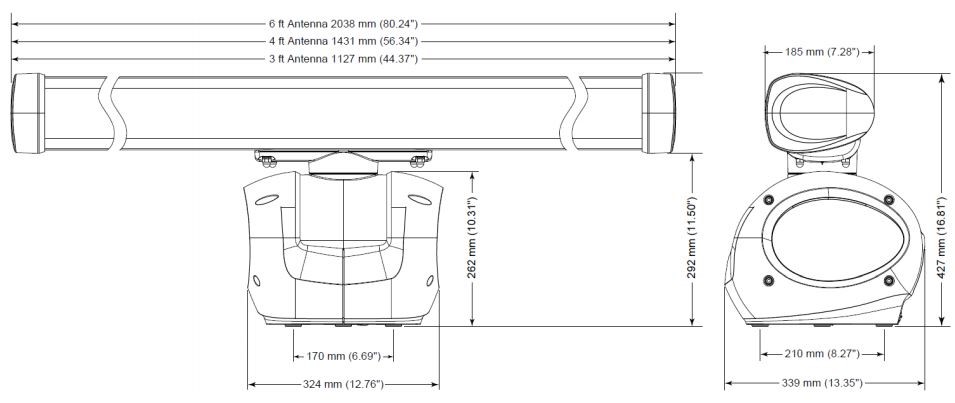
| 형태 및 길이 | 개방형 1,980mm | 개방형 1,200mm | 개방형 1,068mm | 돔형 483mm | 돔형 483mm |
| 중량 | 몸통:18.75kg±10% 안테나:6.5kg±10% | 몸통:18.75kg±10% 안테나:4.9kg±10% | 몸통:18.75kg±10% 안테나:4.1kg±10% | 7.4kg±10% | |
| 방수 등급 | IPX6 | ||||
| 작동 온습도 | -25 ~ +55°C / +40°C 에서 93% RH | ||||
| 주파수 | X-밴드 9410 Mhz | ||||
| 출력 | 25W ±10% | 165mW (통상) | 100mW(통상) | ||
| 수평빔 폭 | 1.2° ±10%(-3db 폭), 빔 선명도 모드시 1° (저)/0.9° (중)/0.8° (고) 가능 |
1.8° ±10%(-3db 폭), 빔 선명도 모드시 1.6° (저)/1.4° (중)/1.2° (고) 가능 |
2.6° ±10%(-3db 폭), 빔 선명도 모드시 2.1° (저)/1.9° (중)/1.6° (고) 가능 |
5.2° ±10% (-3db폭) 타겟 분리시 최대 2.6° |
5.2° ±10% (-3db폭) |
| 수직빔 폭 | 20° ±20% (-3db 폭) | ||||
| 최대표시범위 | 72nm | 64nm | 48nm | 36nm | 24nm |
| 최소표시범위 | 100m | ||||
| 수신 잡음 | 5db | 6db | |||
| 회전속도 | 약 24~48rpm (70knots에서 최소 20rpm) | 24/36 rpm ±10% | |||
| 통신 | Ethernet 10/100 BaseT, NMEA2000/NMEA0183 | ||||
| 케이블 | 20m | 10m | |||
| 전원 및 소비 전력 | DC 10.8 ~ 31.2 V 150W (최대풍속70kt시) / 40W (무풍시) / 6.5W (대기시) |
DC 9 ~ 31.2 V, 20W(통상DC 13.8V / 2.9W (대기시) |
DC 9 ~ 31.2 V, 18W(통상DC 13.8V / 2W (대기시) |
||
| 카테고리 | 질문 | 답 |
|---|---|---|
| 인스톨 | 레이더와 PC / MFD 사이의 거리를 연장할 수 있습니까? | 예, 표준 이더넷 케이블링 규칙을 따라야 합니다. 사용되는 환경과 이더넷 케이블에 따라 섹션당 최대 100m까지 얻을 수 있습니다. 각 '섹션'은 GoFree 장치와 같은 이더넷 스위치를 추가하여 분리되어야 합니다. |
| 인스톨 | NIC 상세 인터페이스 | Navico 레이더는 100mbit(100base-T) 이더넷을 사용합니다. |
| MARPA | MARPA 제한사항 | ● MARPA 계산은 레이더에서 수행됩니다. MARPA 엔진에 액세스 하는 것은 불가능 합니다. ● ARPA는 지원되지 않습니다. |
| MARPA | 대상 추적 제한사항 | 레이더는 수동 타겟 획득(전체 ARPA가 아닌 MARPA)만 지원합니다. 즉, 레이더가 추적하려는 타겟의 상대적 위치를 SDK에 알려줘야 함을 의미합니다. 레이더가 표적을 인식/획득하면 표적을 추적하고 SDK는 목표 표적 상대 및 절대 위치를 주기적으로 출력합니다(적절한 표제 센서가 부착된 경우). 레이더는 범위당 최대 10개의 목표를 추적할 수 있습니다(두 범위가 작동하는 4G 및 HALO의 경우, 20개 목표). |
| MARPA | 표제 정보가 필요할 경우 | 다음과 같은 경우 표제 정보가 필요합니다. ● MARPA 사용 ● PPI 오버레이 사용 표제 정보는 NMEA0183 또는 NMEA2000 또는 이더넷 형식을 통해 제공될 수 있습니다. 정적 설치에서는 표제 정보가 필요하지 않습니다. |
| MARPA | 정지 된 응용 프로그램에서도 MARPA를 사용할 때 표제 정보가 필요한 이유는 무엇입니까? | 레이더는 중요한 표제 변경이 발생할 수 있는 보트에 장착되도록 설계되었으며, 나침반 없이 대상이 스캔하는 사이에 예측 불가능하게 위치를 바꿀 수 있습니다. |
| SDK | 레이더와 교신하기 위해 SDK를 사용할 때 멀티캐스트 이외 다른 통신 옵션이 있습니까? | 아니요. 레이더 자체는 멀티 캐스트 이더넷 주소에서만 UDP를 지원하므로 SDK에서 지원하는 유일한 옵션입니다. |
| SDK | 레이더에서 로우(기초) 데이터를 얻을 수 있습니까? | 스포크 데이터(Spoke data)는 레이더에 의해 내부적으로 처리됩니다. 레이더에서 실제 레이더 데이터(비디오)를 얻을 수는 없지만 레이더가 처리하는 양을 최소화 할 수 있습니다. 이렇게 하려면 LL2 잠금 해제 키가 필요합니다.
그러나 참고: 필요한 전문화 된 처리량을 감안할 때 이 분야에 대한 전문 지식이 없는 경우는 권장하지 않습니다. 레이더에 의한 스포크 처리를 종료하여 레이더 데이터처리를 최소화 할 있습니다. ● 이미지클라이언트의 “스포크 처리 최소화”를 참조 |
| SDK | 콜백(call back) 기능을 사용하여 레이더와 간헐적 통신을하고 있습니다. | Windows 방화벽을 사용하는 경우 BRPC 응용 프로그램에 대한 액세스가 허용되어 있는지 확인하십시오. 특히, 사설망 및 공용 네트워크 액세스를 모두 사용하도록 설정해야 합니다. |
| SDK | UpdateUnlockState() 쿼리 요청을 할 때 여러 응답을 받고 있습니다. | 이것은 Timed Unlock Radar 메시지(예: 0이 아닌 wait_ms 매개 변수)를 사용하고 호스트 PC가 사용 중이거나 리소스가 부족할 때 발생할 수 있습니다. ● 추가 메시지를 무시 ● UnlockRadar를 사용하여 시간 제한 없이 직접 재시도 메소드 생성 |
| SDK | SDK로 작업하려면 Qt가 필요합니까? | 아니요 - Navico는 제공된 데모 응용 프로그램에서 사용되는 것과 같은 GUI를 생성하는 편리한 방법으로 Qt(http://www.qt.io/)만 사용합니다. |
| SDK | BRPC 개발자 포럼 사용 가능 여부 | 이 단계(스테이지)가 아니기 때문에 Navico는 하나를 얻으려고 진행 중입니다. |
| SDK | 누락된 DLL | SDK는 Windows 레지스트리를 사용하지 않으므로 응용 프로그램이 다른 방법으로 DLL을 찾을 수 있어야 합니다. SDK DLL이 애플리케이션과 동일한 디렉토리에 있는지 확인하십시오. 윈도우의 PATH 명령을 통해 찾을 수 있습니다; 또는 프로그래밍 환경이 지원하는 다른 방법을 사용하십시오. |
| SDK | Navico 레이더 프로토콜 문서 | 우리는 레이더 정의를 제공하는 문서를 제공하지 않습니다. 이 BRPC SDK가 대신 제공됩니다. |
| SDK | 레이더가 16진수 잠금 해제 코드를 수락하지 않는 것 같습니다. | 잠금 해제 키는 바이트 배열로 구성되지만 Navico는 16진수 문자열 형식(예: "A23F683C02 ...")으로 텍스트로 제공되므로 훨씬 쉽게 처리할 수 있습니다. 그러나 SDK에는 원본 로우 바이트 배열이 필요하므로, SDK에 제공하기 전에 16진수 문자열을 로우 바이트로 다시 변환해야 합니다. FromHexString 함수는 "examples/GUIDemo/MultiRadar.cpp"에서 정의되고 사용됩니다. |
| SDK | SDK는 C++에서 쓰여지고, 일부 다른 언어에서도 지원합니까? | 기본적으로 C++만 지원하지만 C++ 래퍼를 작성하여 다른 언어로도 가능합니다. |
| SDK | 왜 레이더가 약 15초 후에 이미지 데이터를 보내지 않습니까? | SendClientWatchdog() 함수가 정기적으로 호출되지 않습니다. ● ImageClient 문서의 "레이더에 대한 명령" 섹션을 참조하십시오. |
| 섹터 블랭킹 | 섹터 블랭킹이 지원됩니까? | 섹터 블랭킹은 SDK v3.xx 이상에서만 지원되지만 레이더에 따라 다릅니다. ● 섹터 블랭킹은 HALO 레이더에서 지원됩니다. ● 구역 블랭킹은 광대역 레이더에서 지원되지 않습니다. |
| 해제 키 | 잠금 해제 키 획득 방법 | ● 이 문서 끝의 지시 사항을 따르십시오. 잠금 해제 키는 지정된 BRPC를 통해 요청해야 합니다. |
| 카테고리 | 질문 | 답 |
|---|---|---|
| 인스톨 | 광대역 3GTM 레이더를 인터페이스하려고하지만 DHCP를 통해 연결하는 데 어려움이 있습니다. | 최근의 레이더 릴리스는 DHCP가 레이더에 의해 지원되는 방식을 변경합니다. 레이더를 최신으로 업데이트하십시오.
레이더용 소프트웨어 버전: ● 3G - 3.0.38 이상 사용 ● 4G - 4.1.57 이상 사용 |
| SKD 인스톨 |
레이더에 연결할 수 있지만 데모 애플리케이션에서 잠금 해제 버튼을 클릭하면 잠금 ID를 표시하는 대화 상자가 표시되지 않습니다. | BR24에는 RTM2(v 2.9.271) 이상의 소프트웨어가 로드되어 있어야 합니다. ● BR24 소프트웨어 버전을 확인하고 필요한 경우, 업그레이드하십시오. |
| SDK | 레이더 잠금을 해제할 수 있지만 이더넷을 통해 스포크 데이터를 수신하지 못합니다. | 직렬 통신이 활성화되어있는 경우, 이더넷이 비활성화됩니다. 직렬 연결이 레이더(즉, 직렬 포트를 통해 연결된 MFD)에 감지되면 발생합니다. ● 직렬 MFD를 분리하고 다시 시작하십시오. |
| SDK | 잠금 해제 키를 구입했지만 라이브러리가 여전히 내 레이더에 액세스 할 수 없습니다. | BR24를 사용하는 경우, 레이더는 BR24 RTM2 소프트웨어(2.9.271) 이상을 실행해야 합니다. ● BR24 업그레이드를 위해 Navico에 문의하십시오. |
| SDK | 내 OS에서 라이브러리가 작동하지 않습니다. | Windows-XP(32-bit)는 완전히 승인된 유일한 플랫폼입니다. Windows-7(32비트) 및 Windows-7(64비트)은 아무런 문제없이 시험 사용되었습니다. |
| SDK | 내 컴파일러는 이 라이브러리를 컴파일 할 수 없습니다. | 이 라이브러리는 Microsoft Visual Studio 2005를 사용하여 제작되었으며, Visual Studio 2005, 2006 및 2008과 함께 Windows XP(32비트)에서 테스트되었습니다. ● 위의 제품군 중 하나와 호환되는 컴파일러를 사용하십시오. |
| SDK | VS2010과 함께 SDK를 사용할 때의 문제 |
VS2010과 함께 SDK의 버전 2.0.X를 사용하면 몇 가지 알려진 문제가 있습니다. 컴파일 오류를 막기 위해 SDK 파일을 다음과 같이 변경해야합니다. ● NavDefines.h의 nullptr 정의를 최신 C++ 표준의 키워드로 제거합니다. ● GUIDemo 소스 파일 TabPPI.cpp에서 #include ● SDK는 VS2005를 사용하여 빌드되므로 적절한 VS2005 런타임 DLL이 설치되어 있어야 합니다. 미리 빌드 된 버전의 GUIDemo 테스트 응용 프로그램에 포함된 README.txt 파일에는 라이브러리가 종속되어 있는 dll에 대한 정보가 들어 있습니다. 설치 프로그램에 따라 "Visual Studio 2005 서비스 팩 1 ATL 보안 업데이트"(VS80sp1-KB971090-X86-INTL.exe)로 설치된 런타임 라이브러리 버전을 설치해야 할 수 있습니다. |







